The Right-Hand Rule
When working in Technical Mechanics, we often visualize 2-dimensional \(x\),\(y\) or \(x\),\(z\) coordinate systems, as we frequently encounter plane problems that require their use.

However, it is important to note that we may also need to consider or create a 3-dimensional coordinate system when dealing with more complex problems or analyzing objects in three-dimensional space.
When adding the third coordinate axis, the crucial question is how the missing third coordinate axis relates to the two known axes.
There is a simple rule to determine the arrangement and positive directions of the coordinate axes in a right-handed system (which we use in Technical Mechanics):
The right-hand rule (also known as the three-finger rule)
If you point the outstretched thumb of your right hand in the positive direction of the \(x\)-axis and the extended index finger of your right hand in the positive direction of the \(y\)-axis, then the right-angled middle finger of your right hand points in the positive direction of the \(z\)-axis.
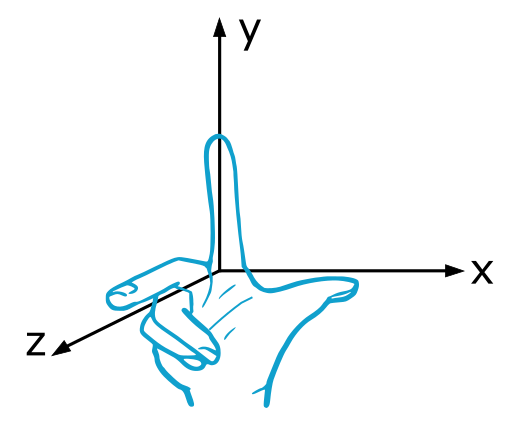
This rule also helps us determine the position and direction of the \(y\)-axis when the \(x\) and \(z\)-axes are given:

The right-hand rule remains consistent regardless of the orientation of the Cartesian coordinate system in space. We can rotate the coordinate system freely, and the right-hand rule still applies.
If we know the orientation of two axes, we can use the right-hand rule to determine the position and direction of the missing axis.
If we only know the position of one axis, we can use the right-hand rule to determine the position and direction of the missing axes in relation to each other. We can freely determine their desired orientation by rotating around the known axis.
Note: The right-handed coordinate system is exclusively used in Technical Mechanics. In rare cases, there is also the left-handed coordinate system, which is used in specific applications, such as:
- Geodesy (mapping of the Earth's surface)
- Economics
- Computer graphics systems