Die Rechte-Hand-Regel
Müssen wir uns ein 3-dimensionales Koordinatensysten vor- oder erstellen, haben wir in der Technischen Mechanik meist schnell das 2-dimensionale \(x\),\(y\)- oder \(x\),\(z\)-Koordinatensystem vor Augen, mit denen wir häufig ebene Probleme lösen müssen:

Müssen wir die dritte Koordinatenachse hinzufügen, dann ist die entscheidene Frage, wie die fehlende dritte Koordinatenachse zu den beiden bekannten Achsen steht.
Es gibt eine einfache Regel, die Anordnung und somit auch positiven Richtungen der Koordinatenachsen in einem Rechtssystem (und das verwenden wir in der Technischen Mechanik) zu bestimmen:
Die Rechte-Hand-Regel (auch: 3-Finger-Regel)
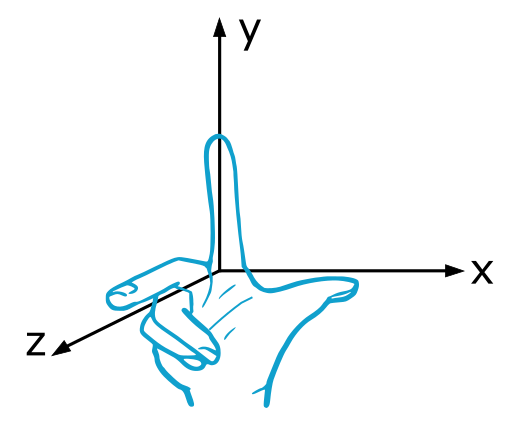
Zeigt man mit dem abgespreizten Daumen der rechten Hand in die positive Richtung der \(x\)-Achse und mit dem gestreckten Zeigefinger der rechten Hand in die positive Richtung der \(y\)-Achse, dann zeigt der rechtwinklig zu diesen Fingern abgespreizte Mittelfinger der rechten Hand in die positive Richtung der \(z\)-Achse.
Diese Regel hilft uns entsprechend auch, wenn wir die Position und Richtung der \(y\)-Achse suchen, wenn \(x\)- und \(z\)-Achse gegeben sind:

Das Rechtssystem bleibt immer bestehen, d.h. wir können das kartesische Koordinatensystem beliebig im Raum rotieren, die Rechte-Hand-Regel gilt immer.
Kennen wir die Lage zweier Achsen, so können wir mit der Rechte-Hand-Regel Ort und Richtung der fehlenden Achse festlegen.
Kennen wir nur die Lage einer Achse, so kennen wir mit der Rechte-Hand-Regel Position und Richtung der fehlenden Achsen zueinander. Ihre gewünschte Lage können wir durch eine Rotation um die bekannte Achse frei bestimmen.
Anmerkung: Das Rechtssystem wird in der Technischen Mechanik ausschließlich verwendet. Daneben gibt es entsprechend auch das Linkssystem, welches allerdings nur in seltenen Anwendungsfällen genutzt wird, beispielsweise in:
- Geodäsie (Kartierung der Erdoberfläche)
- Wirtschaftswissenschaften
- Computergrafiksystemen