3. Parallel Displacement of Coordinate Axes - Steiner's Theorem
In the previous section, we discussed how to determine the area moment of inertia with respect to the axes of any coordinate system for any given surface.
However, since the value of an area moment of inertia depends on the position of the surface relative to the coordinate system, i.e., the reference axes, we need to recalculate this value each time the reference axes are changed.
With the aim of reducing computational effort when changing the reference axes, this section explores the relationship of area moments of inertia in two parallel coordinate systems, with one of them having its origin at the surface centroid.
Let's consider any cross-section in Fig. 6.3.1. The \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-coordinate system is the principal axis system of the depicted surface, meaning it has its origin at the surface centroid \(C\).
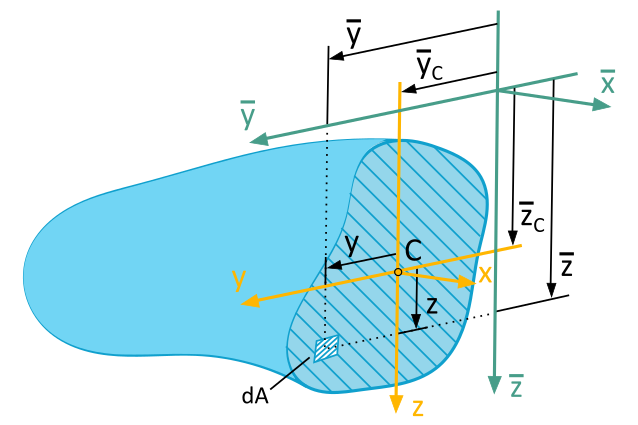
Next to it, we see a \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-coordinate system parallelly shifted with respect to the \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-coordinate system. The centroid coordinates with respect to the \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-coordinate system are \(\overline{y}_c\), \(\overline{z}_c\).
The infinitesimal area element \(\mathrm{d}A\) is located with respect to the \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-coordinate system at the position \(y\), \(z\). Thus, we obtain the positional coordinates of the infinitesimal area element with respect to the \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-coordinate system as
By substituting these two equations (1) and (2) into the formulas (6.2) and (6.4), we obtain the area moments of inertia for an arbitrary \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-coordinate system parallelly shifted with respect to the \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)- principal axis system (coordinate system with the origin at the centroid of the area):
Expanding the parentheses results in
Applying the sum rule and pulling out the constants \(2\), \(\overline{y}_c\), and \(\overline{z}_c\) according to the factor rule before the integrals, we get:
We can simplify the equations by examining the integrals more closely. For instance, \(\int\limits_{(A)} y \ \mathrm{d}A\) and \(\int\limits_{(A)} z \ \mathrm{d}A\) are first-order area moments, also known as static moments.
The static moment finds application, among other things, in determining the centroid coordinates \(y_c\) and \(z_c\):
According to Fig. 6.3.1, our considerations started from a \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-coordinate system with its origin at the centroid of the area. If we visually isolate this coordinate system and divide the area into infinitesimal area elements \(\mathrm{d}A\), we can visualize the static moments:
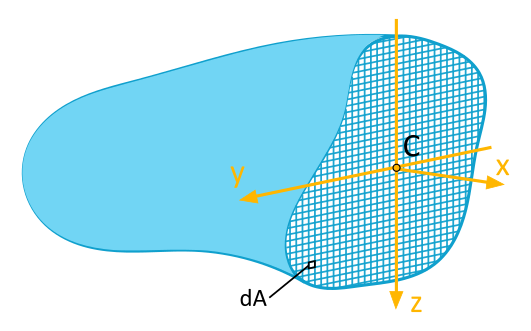
We determine a static moment about an axis by adding all infinitesimal area elements multiplied by their distance from the axis. Dividing this value by the total area gives us the distance from the centroid to that axis.
However, if the coordinate axes, as in our case, such as the \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-axes, are principal axes passing through the centroid and thus having their origin at the centroid of the area, the distances of the centroid to these axes are \(y_c=0\) and \(z_c = 0\).
This means that the static moments for the \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\)- and \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-axes are zero:
Regarding the principal axes \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\), it also holds true according to formulas (6.2) and (6.4):
If we add
and combine it with equations (9) - (11), we obtain the area moments of inertia during the parallel displacement of the reference axes from the centroid:
(6.10)
Equations (6.10) are known as Steiner's theorem.
From Steiner's Theorem, the following peculiarities can be derived:
-
In the axial area moments of inertia \(I_{\overline{y}}\) and \(I_{\overline{z}}\), the Steiner contributions are always positive since the coordinates
\(\overline{y}_c\) and \(\overline{z}_c\) appear squared. Additionally, as they are added for any parallel axes to the axial area moments of the principal axes, this implies:
The axial area moments of inertia \(I_y\) and \(I_z\) for the principal axes \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\) are always smaller than the axial area moments of inertia \(I_{\overline{y}}\) and \(I_{\overline{z}}\) of any arbitrarily displaced \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-coordinate system. - Steiner's theorem only illustrates the relationships between an arbitrarily chosen coordinate axis and the centroid axis, but not the relationships between any two arbitrary coordinate axes.
-
When shifting any coordinate axis towards the centroid axes, the "Steiner contributions" are subtracted:
$$ \begin{align} I_y &= I_{\overline{y}} - \overline{z}_c^2 \cdot A\\[7pt] I_z &= I_{\overline{z}} - \overline{y}_c^2 \cdot A\\[7pt] I_{yz} &= I_{zy} = I_{\overline{yz}} +\overline{y}_c \cdot \overline{z}_c \cdot A \end{align} $$
-
If the area moment of inertia needs to be converted from any axis to another parallel axis, i.e., both axes are not principal axes,
then two steps are necessary:
- First, the known area moment of inertia of the initial axis must be shifted to the centroid axis with the negative Steiner contribution.
- Now, in the second step, the determined area moment of inertia of the centroid axis can be shifted to the desired parallel axis with the corresponding positive Steiner contribution.
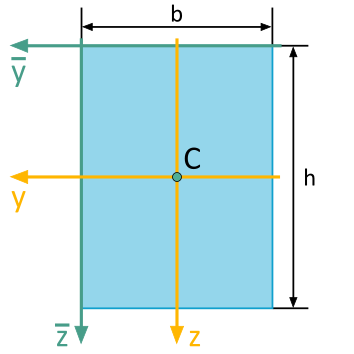
Example 6.5: Determine Area Moment of Inertia for a Coordinate System Parallel to the Principal Axis System
For the depicted rectangular surface, the following area moments of inertia with respect to the illustrated \(\overline{y}\), \(\overline{z}\)-coordinate system are to be determined:
- Axial Area Moment of Inertia \(I_\overline{y}\)
- Axial Area Moment of Inertia \(I_\overline{z}\)
- Biaxial Area Moment of Inertia \(I_{\overline{yz}}\)
The area moments of inertia with respect to the principal axes are given as follows:
Solution
The reference axes of the sought area moments of inertia, \(\overline{y}\) and \(\overline{z}\), are parallel to the principal axes \(y\) and \(z\), for which the area moments of inertia are known. Therefore, we need to apply formula (6.10) to solve this task with minimal effort:
Continue with TechMechAcademy+
Everything. Always. Everywhere.
With TechMechAcademy+ full access to all content.
Overview of the benefits:
- Most cost-effective offer.
- Ideal if you need access to already identified content for a short period.
- Unlimited access to all existing and newly created content throughout the entire premium membership.
- Guaranteed premium membership for 24 hours. Access automatically ends at 0:00 CET (Central European Time) on the following day. No cancellation necessary.
€3.99
Overview of the benefits:
- Cost-effective offer.
- Ideal for short-term exam preparation with the content of TechMechAcademy.
- Unrestricted entry to every piece of content, both existing and newly generated, across the entirety of the premium membership.
- Guaranteed premium membership for one week. Access starts on the day of activation and ends automatically at 0:00 CET (Central European Time) on the following week's day. No cancellation necessary.
€9.99

Overview of the benefits:
- Benefit from the bestseller.
- Ideal for effective exam preparation with the content of TechMechAcademy.
- Complete access to all content, both existing and newly produced, under the umbrella of the premium membership.
- Guaranteed premium membership for one month. Access starts on the day of activation and ends automatically at 0:00 CET (Central European Time) on the following month's day. No cancellation necessary.
€14.99
Are you already a TechMechAcademy+ premium member? Then please log in here to enjoy full access to all content.
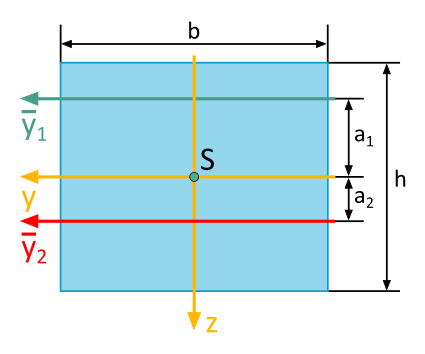
Determine Area Moment of Inertia for a Coordinate System Parallel to the Principal Axis System
The depicted rectangular cross-section has an area of \(A=72~\mathrm{cm}^2\).
The axial area moment of inertia with respect to the \(\overline{y}_1\)-axis (\(a_1 = 5~\mathrm{cm}\)) is known and is \(I_{\overline{y}_1}=2664~\mathrm{cm}^4\).
Calculate the axial area moment of inertia \(I_{\overline{y}_2}\) with respect to the \(\overline{y}_2\)-axis (\(a_2 = 2~\mathrm{cm}\)).