3. Parallelverschiebung der Koordinatenachsen - Der Satz von Steiner
Wir haben im vorherigen Abschnitt erarbeitet, wie wir für eine beliebige Fläche und für ein beliebiges Koordinatensystem die Flächenträgheitsmomente in Bezug auf die Achsen des Koordinatensystems bestimmen können.
Da aber der Wert eines Flächenträgheitsmomentes von der Lage der Fläche zum Koordinatensystem, also zu den Bezugachsen, abhängt, müssen wir diesen Wert bei einer Änderung der Bezugachsen jeweils neu berechnen.
Mit dem Ziel, den Rechenaufwand bei einer Änderung der Bezugachsen zu verringern, untersuchen wir in diesem Abschnitt den Zusammenhang von Flächenträgheitsmomenten in zwei parallelen Koordinatensystemen, wobei eines von ihnen seinen Ursprung im Flächenschwerpunkt hat.
Betrachten wir in Abb. 6.3.1 einen beliebigen Querschnitt. Das \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Koordinatensystem ist das Schwerachsensystem der dargestellten Fläche, d.h. es hat einen Ursprung im Flächenschwerpunkt \(S\).

Daneben sehen wir ein zum \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Koordinatensystem parallel verschobenes \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\),\(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-Koordinatensystem. Die Schwerpunktkoordinaten bezüglich des \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\),\(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-Koordinatensystems sind \(\overline{y}_s\), \(\overline{z}_s\).
Das infinitesimale Flächenelement \(\mathrm{d}A\) befindet sich bezüglich des \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Koordinatensystems an der Position \(y\), \(z\). Damit erhalten wir die Lagekoordinaten des infinitesimalen Flächenelements bezogen auf das \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\),\(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-Koordinatensystem mit
Durch Einsetzen dieser beiden Gleichungen (1) und (2) in die Formeln (6.2) und (6.4) erhalten wir die Flächenträgheitsmomente für ein zu einem \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)- Schwerachsensystem (Koordinatensystem mit Ursprung im Flächenschwerpunkt) parallelen, beliebigen \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\),\(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-Koordinatensystem:
Ausmultiplizieren der Klammern ergibt
Wenden wir die Summenregel an und ziehen die Konstanten \(2\), \(\overline{y}_s\) und \(\overline{z}_s\) entsprechend der Faktorregel vor die Integrale, erhalten wir:
Wir können die Gleichungen vereinfachen, indem wir uns die Integrale genauer ansehen. So sind \(\int\limits_{(A)} y \ \mathrm{d}A\) und \(\int\limits_{(A)} z \ \mathrm{d}A\) Flächenmomente 1. Ordnung, auch statische Momente genannt.
Anwendung findet das statische Moment unter anderem bei der Bestimmung der Schwerpunktkoordinaten \(y_s\) und \(z_s\):
Nach Abb.6.3.1 sind unsere Überlegungen von einem \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Koordinatensystem ausgegangen, das seinen Ursprung im Flächenschwerpunkt hat. Filtern wir dieses Koordinatensystem optisch heraus und unterteilen die Fläche in infintesimale Flächenelemente \(\mathrm{d}A\), können wir uns die statischen Momente veranschaulichen:

Wir bestimmen ein statisches Moment um eine Achse durch die Addition aller Infinitesimalen Flächenelemente multipliziert mit ihrem Abstand zur Achse. Dividieren wir diesen Wert durch die Gesamtfläche, erhalten wir den Abstand des Flächenschwerpunktes zu dieser Achse.
Sind aber die Koordinatenachsen wie in unserem Fall die \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\),\(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Achsen Schwerachsen und haben somit ihren Ursprung im Flächenschwerpunkt, so sind die Abstände des Schwerpunktes zu diesen Achsen \(y_s=0\) und \(z_s = 0\).
Dies bedeutet, dass die statischen Momente für die \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\)- und \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\)-Achse Null sind:
Bezüglich der Schwerachsen \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\) gilt zudem nach den Formeln (6.2) und (6.4) :
Schreiben wir dann noch
erhalten wir mit den Gleichungen (9) - (11) die Flächenträgheitsmomente bei Parallelverschiebung der Bezugachsen aus den Flächenschwerpunkt heraus:
(6.10)
Die Formeln (6.10) werden als Satz von Steiner bezeichnet.
Folgende Besonderheiten lassen sich aus dem Satz von Steiner ableiten:
-
Bei den axialen Flächenträgheitsmomenten \(I_{\overline{y}}\) und \(I_{\overline{z}}\) sind die Steiner-Anteile immer positiv, da die Koordinaten \(\overline{y}_s\) und
\(\overline{z}_s\) im Quadrat auftreten. Da sie zudem für beliebige parallele Achsen zu den axialen Flächenmomenten der Schwerachsen hinzuaddiert werden, bedeutet dies:
Die axialen Flächenträgheitsmomente \(I_y\) und \(I_z\) für die Schwerachsen \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}y}\), \(\definecolor{lsyellow}{RGB}{255,182,0} {\color{lsyellow}z}\) sind immer kleiner als die axialen Flächenträgheitsmomente \(I_{\overline{y}}\) und \(I_{\overline{z}}\) eines beliebigen, parallel verschobenen \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{y}}\), \(\definecolor{lsgreen}{RGB}{79,175,152} {\color{lsgreen}\overline{z}}\)-Koordinatensystems. - Der Satz von Steiner veranschaulicht lediglich die Verhältnisse zwischen einer willkürlich gewählten Koordinatenachse und der Schwerpunktachse, jedoch nicht die Beziehungen zwischen zwei beliebigen Koordinatenachsen.
-
Bei Verschiebung einer beliebigen Koordinatenachse in Richtung der Schwerpunktachsen erfolgt die Subtraktion der "Steiner-Anteile":
$$ \begin{align} I_y &= I_{\overline{y}} - \overline{z}_s^2 \cdot A\\[7pt] I_z &= I_{\overline{z}} - \overline{y}_s^2 \cdot A\\[7pt] I_{yz} &= I_{zy} = I_{\overline{yz}} +\overline{y}_s \cdot \overline{z}_s \cdot A \end{align} $$
-
Muss das Flächenträgheitsmoment von einer beliebigen Achse zu einer anderen beliebigen parallelen Achse umgerechnet werden, d.h. beide Achsen sind keine Schwerachsen,
dann sind zwei Schritte notwendig:
- Zunächst muss das bekannte Flächenträgheitsmoment der ersten Achse mit dem negativen Steiner-Anteil zur Schwerachse hingeschoben werden.
- Jetzt kann im zweiten Schritt das ermittelte Flächenträgheitsmoment der Schwerachse mit dem entsprechenden positiven Steiner-Anteil zur gesuchten, parallelen Achse verschoben werden.
Beispiel 6.5: Bestimme Flächenträgheitsmoment für ein Koordinatensystem parallel zum Schwerachsensystem
Für die abgebildete Rechteckfläche sind folgende Flächenträgheitsmomente bezüglich des dargestellten \(\overline{y}\), \(\overline{z}\)-Koordinatensystems zu bestimmen:

- axiales Flächenträgheitsmoment \(I_\overline{y}\)
- axiales Flächenträgheitsmoment \(I_\overline{z}\)
- biaxiales Flächenträgheitsmoment \(I_{\overline{yz}}\)
Gegeben sind die Flächenträgheitsmomente bezüglich der Schwerachsen:
Lösung
Die Bezugachsen der gesuchten Flächenträgheitsmomente, \(\overline{y}\) und \(\overline{z}\), liegen parallel zu den Schwerachsen \(y\) und \(z\), für die die Flächenträgheitsmomente bekannt sind. Wir müssen also die Formel (6.10) anwenden, um diese Aufgabe mit möglichst geringem Aufwand zu lösen:
Weiterlesen mit TechMechAcademy+
Alles. Immer. Überall.
Mit TechMechAcademy+ vollen Zugriff auf alle Inhalte.
Die Vorteile im Überblick:
- Kostengünstigstes Angebot.
- Ideal, wenn du für kurze Zeit Zugriff auf bereits identifizierte Inhalte benötigst.
- Unbegrenzter Zugriff auf alle vorhandenen und neu erstellten Inhalte während der gesamten Premiummitgliedschaft.
- Garantierte Premiummitgliedschaft für 24 Stunden. Der Zugang endet automatisch um 0:00 MEZ (Mitteleuropäische Zeit) am darauffolgenden Tag. Keine Kündigung notwendig.
3,99 €

Die Vorteile im Überblick:
- Kostengünstiges Angebot.
- Ideal für kurzfristige Prüfungsvorbereitung mit den Inhalten von TechMechAcademy.
- Unbeschränkter Zugang zu sämtlichen bestehenden und frisch erstellten Inhalten im Rahmen der gesamten Premiummitgliedschaft.
- Die Premiummitgliedschaft ist für einen garantierten Zeitraum von einer Woche gültig. Der Zugang beginnt am Tag der Aktivierung und endet automatisch um 0:00 MEZ (Mitteleuropäische Zeit) am darauffolgenden Tag der Folgewoche. Keine Kündigung notwendig.
9,99 €

Die Vorteile im Überblick:
- Profitiere vom Bestseller.
- Ideal für effektive Prüfungsvorbereitung mit den Inhalten von TechMechAcademy.
- Unlimitierter Zugriff auf alle bereits vorhandenen und neu geschaffenen Inhalte während der gesamten Dauer der Premiummitgliedschaft.
- Die Premiummitgliedschaft ist für einen garantierten Zeitraum von einem Monat gültig. Der Zugang beginnt am Tag der Aktivierung und endet automatisch um 0:00 MEZ (Mitteleuropäische Zeit) am darauffolgenden Tag des Folgemonats. Keine Kündigung notwendig.
14,99 €
Bist du bereits ein TechMechAcademy+ Premiummitglied? Dann logge dich bitte hier ein, um den vollen Zugriff auf alle Inhalte zu genießen.
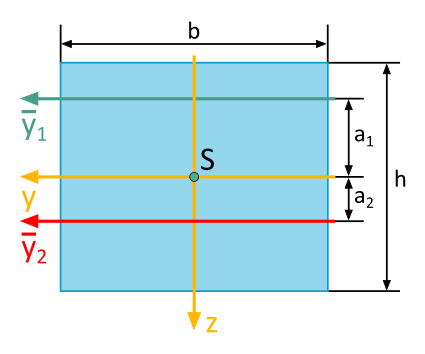
Bestimme Flächenträgheitsmomente für ein Koordinatensystem parallel zum Schwerachsensystem
Der dargestellte Rechteckquerschnitt hat eine Fläche von \(A=72~\mathrm{cm}^2\).
Das axiale Flächenträgheitsmoment bezogen auf die \(\overline{y}_1\)-Achse (\(a_1 = 5~\mathrm{cm}\)) ist bekannt und beträgt \(I_{\overline{y}_1}=2664~\mathrm{cm}^4\).
Berechne das axiale Flächenträgheitsmoment \(I_{\overline{y}_2}\) bezogen auf die \(\overline{y}_2\)-Achse (\(a_2 = 2~\mathrm{cm}\)).